publications
2021
-
 Reinforcement Learning Experiments and Benchmark for Solving Robotic Reaching TasksPierre Aumjaud, David McAuliffe, Francisco Javier Rodríguez-Lera, and 1 more authorAdvances in Intelligent Systems and Computing, 2021
Reinforcement Learning Experiments and Benchmark for Solving Robotic Reaching TasksPierre Aumjaud, David McAuliffe, Francisco Javier Rodríguez-Lera, and 1 more authorAdvances in Intelligent Systems and Computing, 2021Reinforcement learning has shown great promise in robotics thanks to its ability to develop efficient robotic control procedures through self-training. In particular, reinforcement learning has been successfully applied to solving the reaching task with robotic arms. In this paper, we define a robust, reproducible and systematic experimental procedure to compare the performance of various model-free algorithms at solving this task. The policies are trained in simulation and are then transferred to a physical robotic manipulator. It is shown that augmenting the reward signal with the Hindsight Experience Replay exploration technique increases the average return of off-policy agents between 7 and 9 folds when the target position is initialised randomly at the beginning of each episode.
@article{Aumjaud2021a, author = {Aumjaud, Pierre and McAuliffe, David and Rodr{\'{i}}guez-Lera, Francisco Javier and Cardiff, Philip}, journal = {Advances in Intelligent Systems and Computing}, doi = {https://doi.org/10.1007/978-3-030-62579-5_22}, isbn = {978-3-030-62579-5}, pages = {318--331}, title = {Reinforcement Learning Experiments and Benchmark for Solving Robotic Reaching Tasks}, volume = {1285}, year = {2021}, } -
 rl_reach: Reproducible reinforcement learning experiments for robotic reaching tasksPierre Aumjaud, David McAuliffe, Francisco J. Rodríguez Lera, and 1 more authorSoftware Impacts, May 2021
rl_reach: Reproducible reinforcement learning experiments for robotic reaching tasksPierre Aumjaud, David McAuliffe, Francisco J. Rodríguez Lera, and 1 more authorSoftware Impacts, May 2021Training reinforcement learning agents at solving a given task is highly dependent on identifying optimal sets of hyperparameters and selecting suitable environment input/output configurations. This tedious process could be eased with a straightforward toolbox allowing its user to quickly compare different training parameter sets. We present rl_reach, a self-contained, open-source and easy-to-use software package designed to run reproducible reinforcement learning experiments for customisable robotic reaching tasks. rl_reach packs together training environments, agents, hyperparameter optimisation tools and policy evaluation scripts, allowing its users to quickly investigate and identify optimal training configurations. rl_reach is publicly available at this URL: https://github.com/PierreExeter/rl_reach.
@article{Aumjaud2021, author = {Aumjaud, Pierre and McAuliffe, David and Rodr{\'i}guez Lera, Francisco J. and Cardiff, Philip}, title = {<span class="monospace">rl{\_}reach</span>: Reproducible reinforcement learning experiments for robotic reaching tasks}, journal = {Software Impacts}, year = {2021}, month = may, day = {01}, publisher = {Elsevier}, volume = {8}, issn = {2665-9638}, doi = {10.1016/j.simpa.2021.100061}, url = {https://www.sciencedirect.com/science/article/pii/S2665963821000099}, archiveprefix = {arXiv}, eprint = {2102.04916}, keywords = {Artificial intelligence,Experiments,Reinforcement learning,Robotics}, }
2016
2015
-
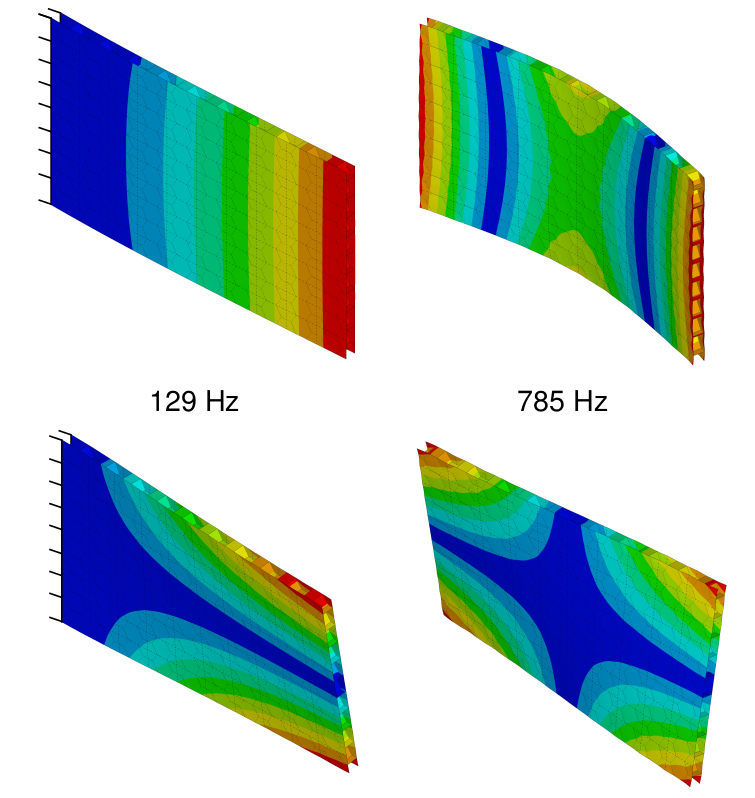
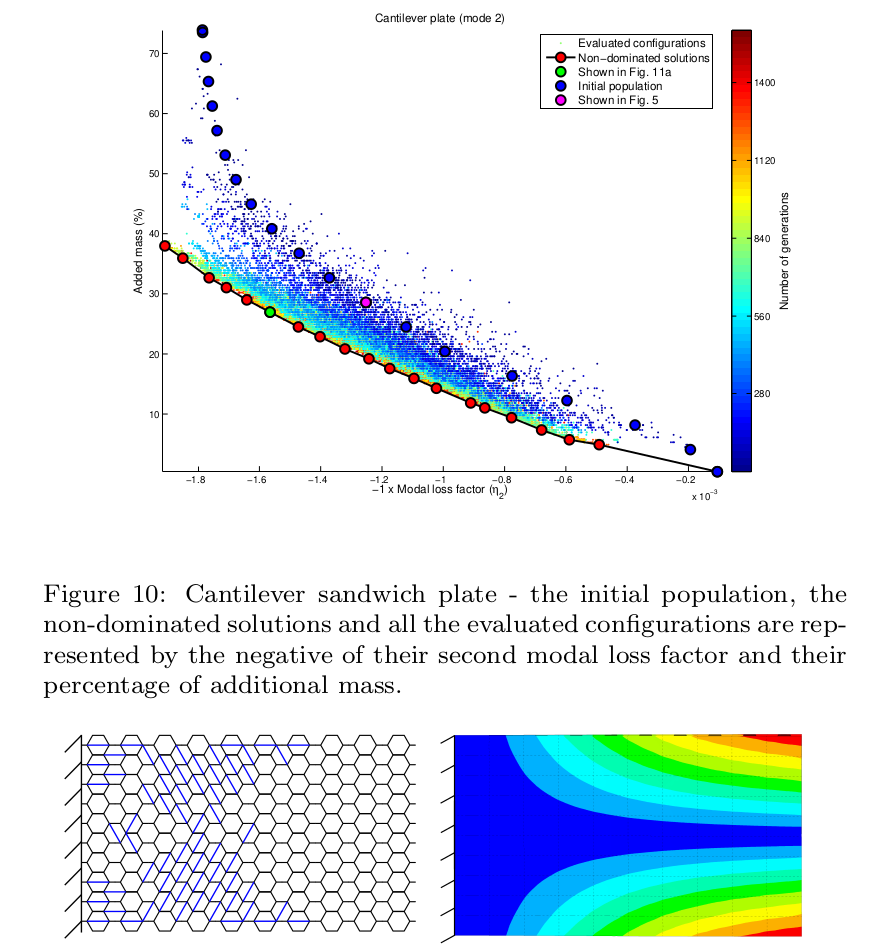 Multi-objective optimisation of viscoelastic damping inserts in honeycomb sandwich structuresPierre Aumjaud, Jonathan E. Fieldsend, Marc-Antoine Boucher, and 2 more authorsComposite Structures, May 2015
Multi-objective optimisation of viscoelastic damping inserts in honeycomb sandwich structuresPierre Aumjaud, Jonathan E. Fieldsend, Marc-Antoine Boucher, and 2 more authorsComposite Structures, May 2015The Double-Shear Lap Joint (DSLJ) is a novel damping insert sited internally within a structure which is particularly well suited for lightweight sandwich structures with internal voids, such as honeycomb core sandwich panels. In high performance lightweight structures, the insertion of relatively more dense dampers of any type may increase the total mass substantially and alter the mass distribution significantly. The objective herein was to determine the optimum location, number and orientation of DSLJ inserts within a typical sandwich panel, and thereby to assess the efficacy of two different optimisation approaches to this problem; a parametric optimisation and the Adaptive Indicator-Based Evolutionary Algorithm (IBEA). Both approaches were used to maximise the damping while minimising the additional mass of the damping inserts applied to the structure. Although the parametric approach was faster and easier to implement, the Adaptive IBEA identified significantly better configurations in many cases, especially where veering occurred, in one case improving modal loss factors more than fourfold vs the parametric method. Solutions were identified with large increases in modal loss factors but only small increases in mass vs the empty structure.
@article{AUMJAUD2015451, title = {Multi-objective optimisation of viscoelastic damping inserts in honeycomb sandwich structures}, journal = {Composite Structures}, volume = {132}, pages = {451-463}, year = {2015}, issn = {0263-8223}, doi = {https://doi.org/10.1016/j.compstruct.2015.05.061}, url = {https://www.sciencedirect.com/science/article/pii/S0263822315004444}, author = {Aumjaud, Pierre and Fieldsend, Jonathan E. and Boucher, Marc-Antoine and Smith, Christopher W. and E., Evans Ken}, keywords = {Vibration, Damping, Sandwich panel, Optimisation, Lightweight}, } -
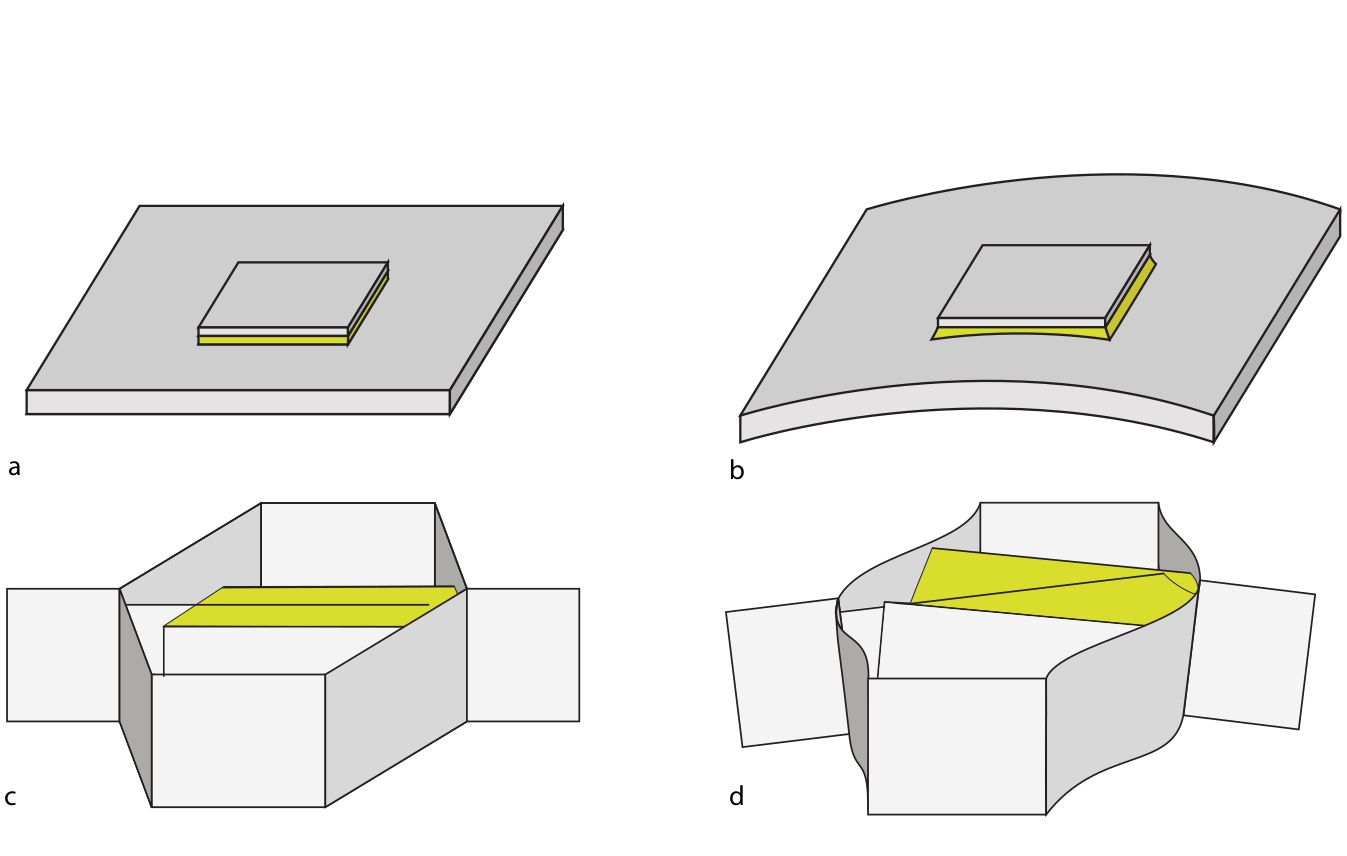
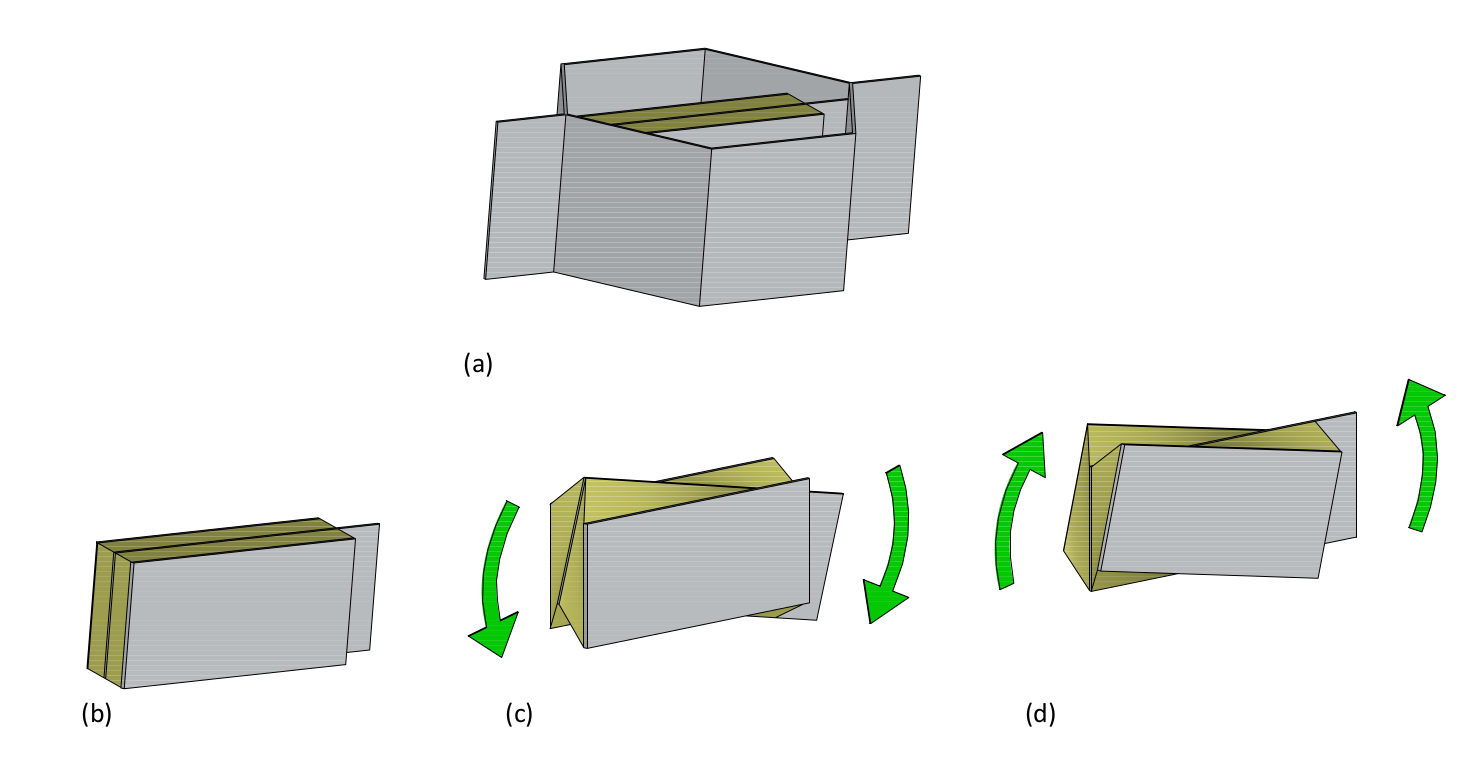 A novel viscoelastic damping treatment for honeycomb sandwich structuresPierre Aumjaud, Christopher W. Smith, and Evans Ken E.Composite Structures, May 2015
A novel viscoelastic damping treatment for honeycomb sandwich structuresPierre Aumjaud, Christopher W. Smith, and Evans Ken E.Composite Structures, May 2015Constrained layer dampers (CLD) are in widespread use for passive vibration damping, in applications including aerospace structures which are often lightweight. The location and dimensions of CLD devices on structures has been the target of several optimisation studies using a variety of techniques such as genetic algorithms, cellular automata, and gradient techniques. The recently developed double shear lap-joint (DSLJ) damper is an alternative method for vibration damping, and can be placed internally within structures. The performance of the DSLJ damper is compared in a parametric study with that of CLD dampers on beam and plate structures under both cantilever and simply supported boundary conditions, using finite element analysis. The objective was to determine which damper and in which configuration produced the highest modal loss factor and amplitude reduction for least added mass, as would be important for lightweight applications. The DSLJ tend to be more mass efficient in terms of loss factor and amplitude reduction for cantilevered beam and plate structure, and are competitive with CLD dampers in simply supported beam and plate structures. The DSLJ works well because it has the potential to magnify global flexural deformation into shear deformation in the viscoelastic more effectively than traditional CLD dampers.
@article{AUMJAUD2015322, title = {A novel viscoelastic damping treatment for honeycomb sandwich structures}, journal = {Composite Structures}, volume = {119}, pages = {322-332}, year = {2015}, issn = {0263-8223}, doi = {https://doi.org/10.1016/j.compstruct.2014.09.005}, url = {https://www.sciencedirect.com/science/article/pii/S0263822314004383}, author = {Aumjaud, Pierre and Smith, Christopher W. and E., Evans Ken}, keywords = {Honeycomb, Damping, Viscoelastic, Double shear lap-joint damper}, }
2014
-
 Optimised location and orientation of passive viscoelastic dampers for lightweight sandwich structuresPierre Aumjaud, Christopher W. Smith, Jonathan E. Fieldsend, and 1 more authorBritish Society for Strain Measurement, May 2014
Optimised location and orientation of passive viscoelastic dampers for lightweight sandwich structuresPierre Aumjaud, Christopher W. Smith, Jonathan E. Fieldsend, and 1 more authorBritish Society for Strain Measurement, May 2014@article{Aumjaud2014, title = {Optimised location and orientation of passive viscoelastic dampers for lightweight sandwich structures}, journal = {British Society for Strain Measurement}, year = {2014}, url = {https://ore.exeter.ac.uk/repository/handle/10871/21249}, author = {Aumjaud, Pierre and Smith, Christopher W. and Fieldsend, Jonathan E. and E., Evans Ken} } -
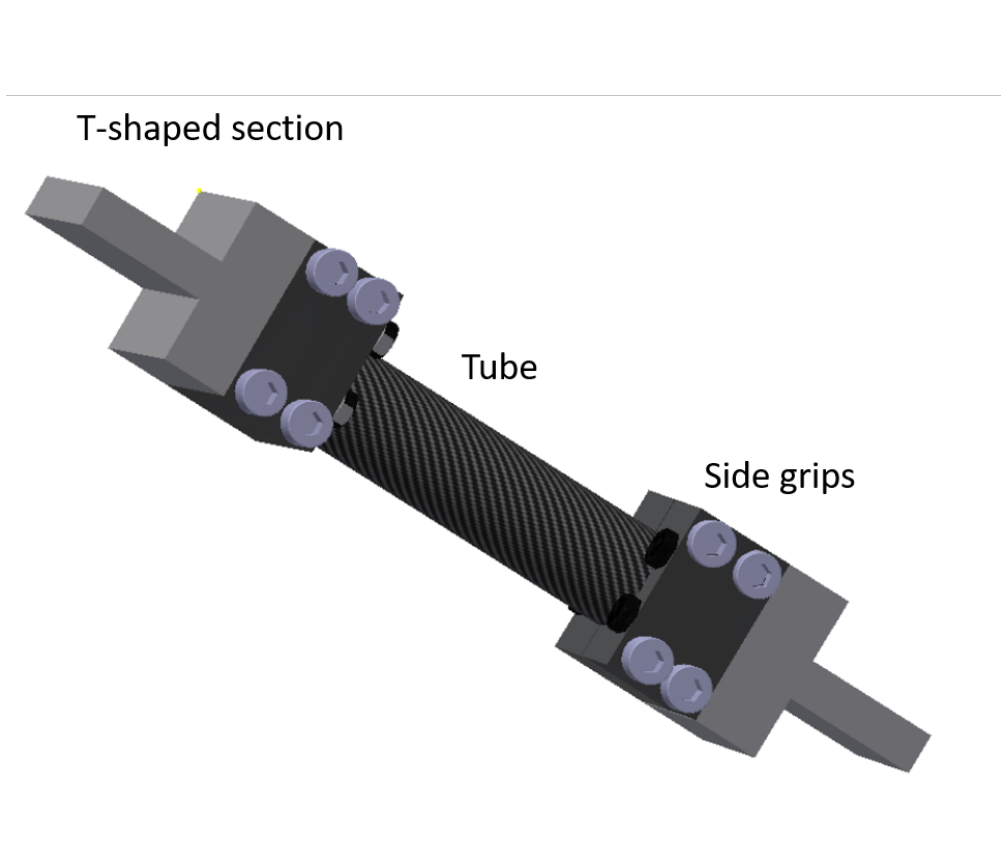 Mechanical performance of carbon-fibre braided composite tubes in tension and compressionUmair Javaid, Pierre Aumjaud, Barry Whelan, and 1 more authorEngineering Archive, May 2014
Mechanical performance of carbon-fibre braided composite tubes in tension and compressionUmair Javaid, Pierre Aumjaud, Barry Whelan, and 1 more authorEngineering Archive, May 2014This article examines the effect of braid angle on the mechanical performance of carbon-epoxy braided tubes in tension and compression. Vacuum-assisted resin transfer moulding is used to produce a variety of tubes with several combinations of 15◦and 20◦ braid angles. As uniaxial tensile testing of cylindrical tubes is not trivial, two tensile testing fixture designs are explored. It is found that a combination of mechanical and adhesive gripping produces repeatable fractures between the grips, with no slipping. Tubes with lower braid angles exhibit higher strengths both in tension and compression, as well as absorbing greater amounts of energy in compression.
@article{Javaid2014, title = {Mechanical performance of carbon-fibre braided composite tubes in tension and compression}, journal = {Engineering Archive}, year = {2014}, doi = {https://doi.org/10.31224/osf.io/mw5tp}, url = {https://engrxiv.org/preprint/view/2019}, author = {Javaid, Umair and Aumjaud, Pierre and Whelan, Barry and Cardiff, Philip}, keywords = {braid angle, Braided composites, compression, mechanical testing, tension}, }